Мы используем Arduino для создания автономного кулера «следуй за мной», который подключается к смартфону через Bluetooth и использует GPS для навигации. Робот-охладитель подключается к смартфону через Bluetooth и использует GPS для навигации. Вся электроника будет помещена в базу, так что можно будет переносить и другие предметы. Чтобы построить основу, мы использовали большой кусок обрезной плиты МДФ 1/4 дюйма и пару досок 1x3 дюйма, которые служили боковыми стенками. Поднятие досок вверх для создания ящика помогало удерживать кулер на месте во время движения основания.

1/2
Мы измерили, что ДВП примерно на 1 дюйм больше с каждой стороны, чем размеры нижней части кулера. В данном случае кулер был 17,5x11,5 дюймов, поэтому мы разрезали МДФ примерно на 19,5x13,5 дюймов. Дополнительное пространство позволило прибить доски размером 1x3 дюйма к МДФ. Наш лобзик отлично справился с резкой этого куска.
Доски размером 1x3 дюйма были обрезаны до такой же длины, как и глубина основания, но мы сделали их примерно на 2 дюйма короче по ширине, чтобы они могли выровняться с краями МДФ. Доски были прикреплены к МДФ с помощью нескольких маленькие гвозди.

1/4
Для размещения электроники мы сделали небольшую коробку, используя тот же процесс, что и базовая платформа (хотя и с использованием досок 1х2 дюйма вместо 1х3). Мы оценили размеры, но они оказались примерно 11x9 дюймов. Блок электроники был прибит к основанию платформы после того, как мы вырезали отверстие в МДФ лобзиком.

1/2
Наконец, мы добавили компоненты для системы привода. На колесах использовалась пара кронштейнов, напечатанных на 3D-принтере (3D-детали представлены ниже) для крепления наших двигателей с высоким крутящим моментом 12 В. К металлической ступице был прикреплен разъем, напечатанный на 3D-принтере, для крепления колеса на валах двигателя. На задней части платформы использовалось простое поворотное колесо. Он был прикреплен с помощью другого кронштейна, напечатанного на 3D-принтере.

1/2 • Система привода
Электроника была установлена в вырез коробки под платформой. Мы использовали Arduino Uno и батарею 5 В для питания датчиков, Bluetooth и логики управления. Для питания двигателей использовалась батарея LiPo 3s.
Arduino Uno и батарея 5 В
Модуль Bluetooth HC-05 был установлен в передней части платформы для большей дальности. Остальные компоненты, включая драйвер двигателя L298N, PAM-7Q GPS и компас HMC6883L, были установлены внутри и подключены к Arduino через макетную плату.

Компас работает с I2C, поэтому мы подключили выводы SLC и SDA к A5 и A4 соответственно. Остальные выводы были подключены через цифровой ввод / вывод. Для получения дополнительной информации о том, как мы подключили провода, см. Схемы, представленные в разделе схем ниже.
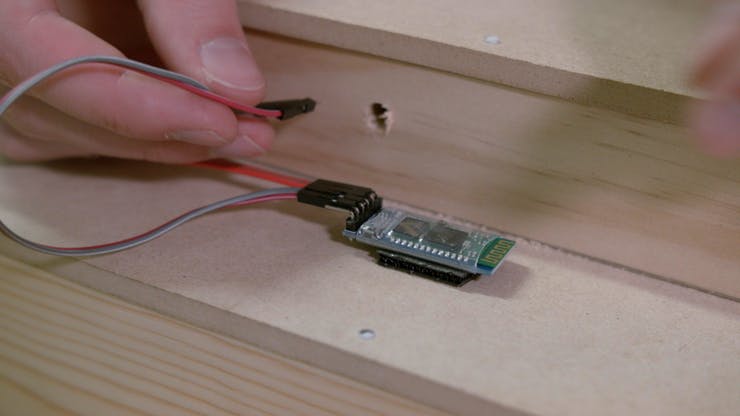
1/3 • Bluetooth, GPS и компас
Электродвигатели приводились в действие путем просверливания отверстий в платформе и прикрепления к ним платы привода двигателя L298N. 3s LiPo был подключен в качестве основного источника питания, и мы связали землю вместе с источником питания Arduino для логики управления.
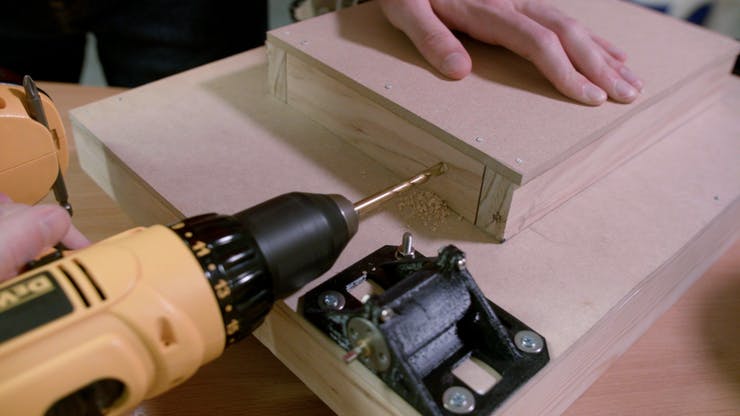
1/2 • Подключение двигателей
На следующем изображении показано, как все выглядело после подключения к блоку электроники.
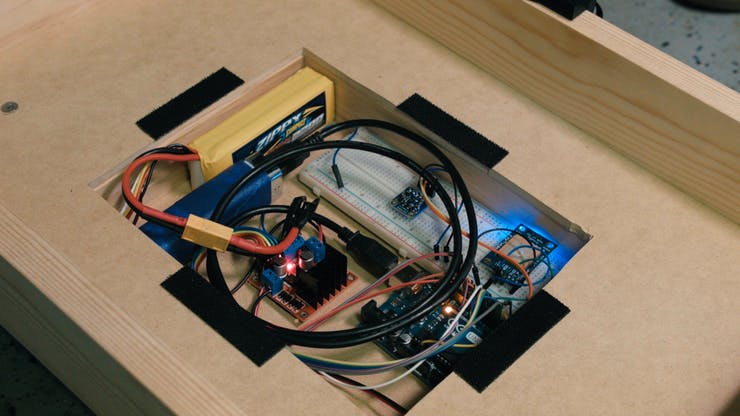
Все подключено в коробке с электроникой
Моторизованной крышки не было ни в одном из наших видеороликов о сборке, поэтому мы опубликовали несколько дополнительных инструкций о том, как ее добавить. На крышке кулера было несколько выемок, которые удерживали ее закрытой при закрытии. Наш сервопривод не был достаточно силен, чтобы поднять крышку, когда она была закрыта, поэтому мы использовали небольшой инструмент Dremel, чтобы зашкурить выемки. Мы использовали сервопривод MG996R с высоким крутящим моментом для управления крышкой. Мы напечатали на 3D-принтере шарнирный рычаг для соединения рупора сервопривода с верхней частью кулера. Чтобы удержать его на месте, мы использовали клей гориллы. Сервопривод был установлен на боковой стороне кулера с помощью куска двусторонней монтажной ленты 3M для установки вне помещений. В задней части кулера было просверлено отверстие для пропуска проводов сервопривода. Мы использовали пару удлинительных проводов, чтобы подключить его к питанию, земле и контакту 3 сигнального провода на Arduino.

1/4 • Добавление сервопривода для моторизованной крышки
Это конфигурация, которую мы использовали для нашего приложения Blynk.

После того, как вы все настроили свойство, проверьте и загрузите код в свой Arduino. Если вы находитесь на улице, GPS-навигатору потребуется несколько секунд, чтобы захватить спутник. Как только это произойдет, он начнет мигать. Убедитесь, что ваше устройство Android сопряжено с модулем Bluetooth HC-05. Если он запрашивает пароль, он должен быть по умолчанию 1234. Откройте Blynk и нажмите кнопку воспроизведения!
0Весь код этого проекта предоставляется с открытым исходным кодом на нашей странице Github
Аарон @ Hacker Shack